Robot control system
The process of human-computer interaction requires that the robot be able to interact physically in a constrained workspace and satisfy the case where the control input is limited. We combine the nested saturation function and Barrier Lyapunov Function to construct the constraint control system of the closed-loop system of human-computer physical interaction to realize the stability and target trajectory tracking. Aime at the flexible and rigid part of the robot, the singular perturbation model of fast and slow change is established, based on the model, the adaptive neural network control method is designed to realize the stability and target trajectory tracking of the human - computer interaction system.

Flapping wing flying robot system
Flapping wing flying micro robot is widely used in national defence and civilian field because of its small size, light weight and low cost. It can accomplish many missions that other aircrafts can not carry out, such as low altitude reconnaissance, city operation, accurate delivery and other areas of national defense; natural disaster surveillance and support, environment and pollution monitoring and other areas of civilian field. Compared with fixed wing aircraft and rotary wing aircraft, the main feature of flapping wing flying robot is the integration of lifting, hovering and propulsion functions into a flapping wing system, which has strong maneuverability and high flexibility.

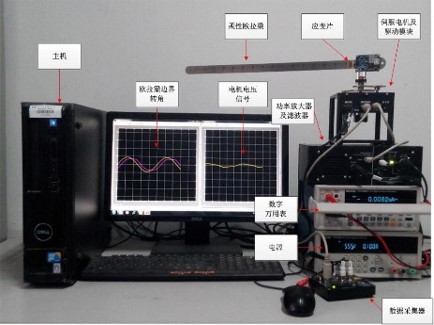
The flexible manipulator system is a distributed parameter system. We use partial differential equations to design a boundary control algorithm to achieve the control of the flexible manipulator, which can minimize the vibration generated during operation and control the manipulator arm to rotate to the desired angular displacement and accurately track the manipulator.